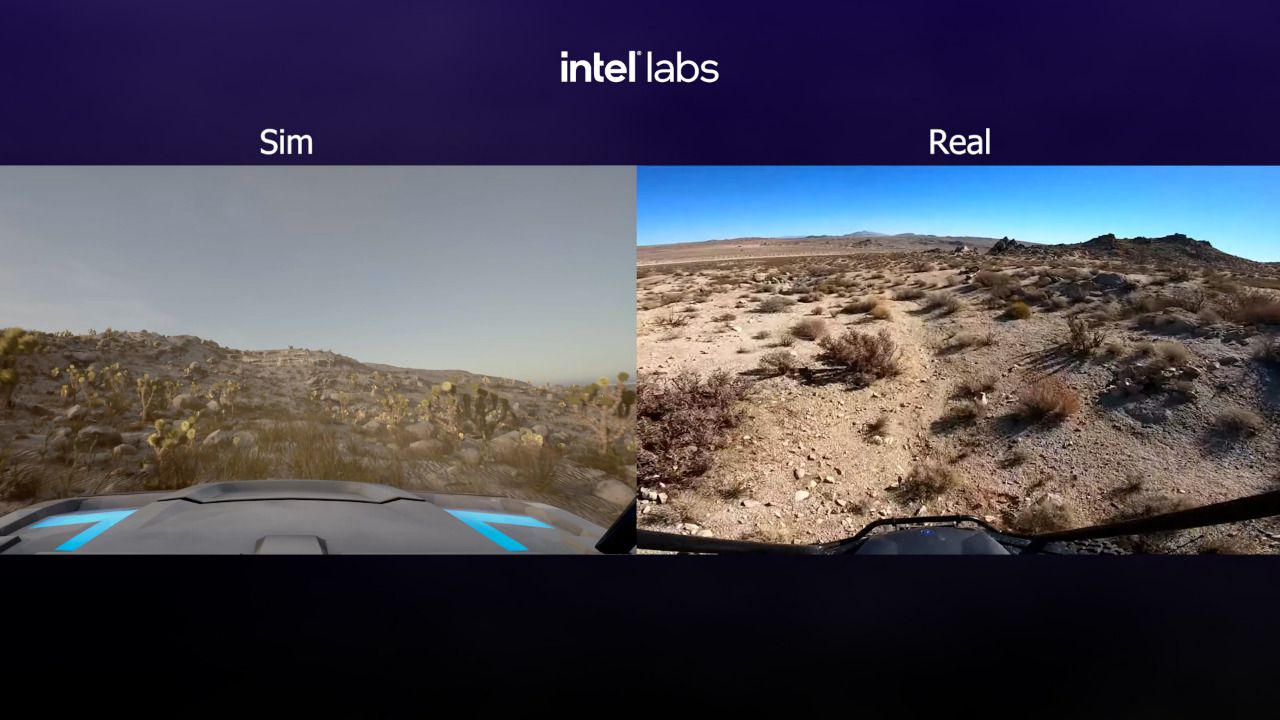
El programa Robotic Autonomy in Complex Environments with Resiliency – Simulation (RACER-Sim, por sus siglas) tiene como objetivo crear la próxima generación de plataformas de simulación de vehículos off-road para reducir el coste de desarrollo y salvar la distancia entre la simulación y el mundo real.
"Intel Labs ya ha progresado en el avance de la simulación de vehículos autónomos a través de varios proyectos, incluido el simulador CARLA, y estamos orgullosos de participar en RACER-Sim para seguir contribuyendo a traspasar la próxima frontera de la robótica todoterreno y los vehículos autónomos”, destaca German Ros, Autonomous Agents Lab director de Intel Labs. “Por ello, hemos reunido a un equipo de expertos de renombre del Computer Vision Center y de la UT Austin con el objetivo de crear una plataforma versátil y abierta para acelerar el progreso de los robots todoterreno en todo tipo de entornos y condiciones", asegura Ros.
Digitalizar las carreteras, la solución necesaria para solventar problemas de suministro y logística
Leer más
Acercando la realidad a la simulación
Son muchos los entornos de simulación que hay en la actualidad, sin embargo pocos están preparados y optimizados para el desarrollo de la autonomía fuera de la carretera y las demos en el mundo real siguen siendo el método principal de verificación de rendimiento del sistema.
En este contexto, los vehículos autónomos todoterreno deben enfrentares a importantes retos, como la falta de carreteras y terrenos extremos reales con rocas y todo tipo de vegetación, lo que provoca que el desarrollo y las pruebas sean lentas y costosas. Aquí es donde entra el programa RACER-Sim que busca resolver este problema proporcionando tecnologías de simulación avanzadas para desarrollar y testar soluciones, lo que permitirá reducir tiempos y validar los sistemas autónomos impulsados por IA.
En qué consiste el programa RACER-Sim
El RACER-Sim cuenta con dos fases que se alargarán durante los 48 meses que durará el programa y que tendrá como objetivo acelerar el proceso de investigación y desarrollo para el diseño de vehículos autónomos todoterreno.
Durante la primera fase del proyecto, Intel creará nuevas plataformas de simulación y herramientas de generación de mapas que imitan entornos todoterreno complejos con la máxima precisión. La creación de estos entornos es un proceso que suele requerir grandes recursos, y para solucionarlo, la plataforma de Intel Labs permitirá personalizar futuros mapas, incluyendo la creación de nuevos entornos masivos que cubran más de 258.998 kilómetros cuadros con solo unos pocos clics.
En la segunda fase, Intel Labs trabajará con sus colaboradores para acelerar el proceso de I+D con la implementación de nuevos algoritmos sin el uso de un robot físico. Tras ello, los equipos validarán el rendimiento del robot en la simulación, lo que supondrá un importante ahorro de recursos y de tiempo. Asimismo, se incluirá el desarrollo de nuevas técnicas sim2real que permitan el entrenamiento de vehículos autónomos todoterreno directamente en la simulación.







 Si (
Si ( No(
No(
: 'Llegaremos a los 22 millones de hogares antes de final de año'")












