En un artículo recientemente publicado en Science Robotics, un grupo de investigadores de Microsoft presentó una nueva teoría de la interacción háptica que identifica un Uncanny Valley para el tacto.
Sus ensayos sugieren que cuando los estímulos hápticos no están sincronizados con el resto de la percepción sensorial, pueden dificultar la experiencia. Los expertos creen que esta investigación creará una nueva tendencia de pensamiento entre los diseñadores de interacciones y dispositivos táctiles.
Los investigadores Mar Gonzalez Franco, Eyal Ofek, Ken Hinckley y Christopher Berger, investigador visitante del California Institute of Technology, eligieron la realidad virtual como banco de pruebas. La RV es una gran herramienta para revelar fenómenos extraños en nuestra percepción sensorial cotidiana. Podemos utilizar la RV para producir una sensación de tacto que aparenta originarse en un espacio completamente vacío entre las manos mientras se sostienen dos mandos.
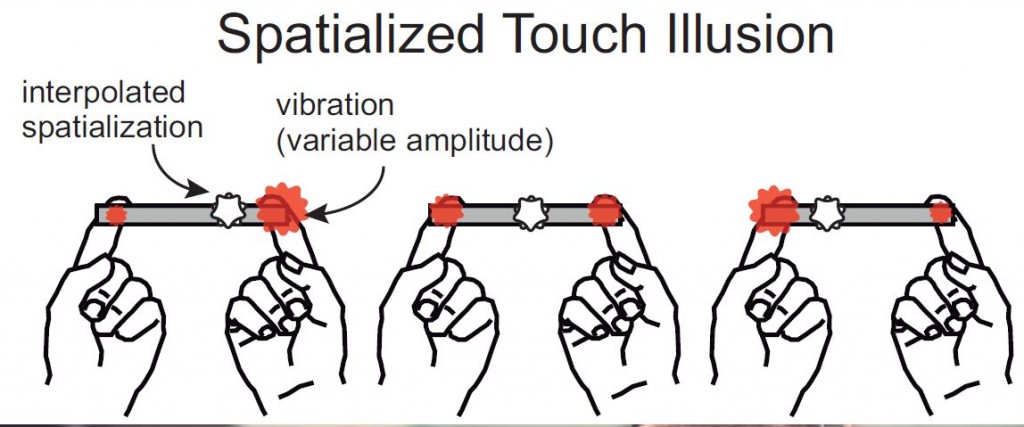
Cada mando proporciona al usuario estímulos vibro-táctiles sincronizados de diferentes amplitudes. En el entorno virtual, le mostramos al participante un listón de madera que agarra con cada mano. El listón es sólo imaginario, por supuesto; las manos no están físicamente unidas y el listón no existe. Luego mostramos una pequeña canica blanca que parece golpear el listón en diferentes lugares a medida que variamos las sensaciones vibratorias.
Lo que es interesante es que no sólo el listón es imaginario, sino también que la aparente ubicación espacial de la sensación táctil de la canica persiste, incluso si la canica deja de ser visible. Esto se debe a que el cerebro sigue la regla de unidad por la cual dos eventos sincronizados, que están conectados en el tiempo, también deben estar conectados en el espacio, por lo tanto tienen la misma causa y origen. En este caso, las dos vibraciones que se sienten en las manos se perciben como el resultado de un solo toque que procede de la misma ubicación a lo largo del listón virtual, sin importar si la canica es visible o no.
En entornos virtuales, la generación de sensaciones hápticas de alta precisión de este tipo lleva asociadas la suposición de que tales mejoras siempre producirán una experiencia más realista e inmersiva. Sin embargo, esta investigación descubrió que añadir el toque espacial por sí solo, sin la equivalencia visual de la canica, puede reducir en gran medida el realismo percibido y la inmersión en el entorno virtual. Todo ello, a pesar de que los participantes en el experimento fueron capaces de precisar la ubicación de la sensación táctil de forma correcta, tanto cuando la canica era visible como cuando dejaba de serlo.
¿Te ha parecido interesante esta noticia? Si (0) No(0)








 Si (
Si ( No(
No(
: 'Llegaremos a los 22 millones de hogares antes de final de año'")












